滴滴刘向宏:面向未来的智慧交通云控平台
发布时间:2019年5月6日 10:36 阅读量:4887 文章分类:行业新闻
智慧交通发展的必然趋势是向自动驾驶方向前进的,但如果单方面提升自动驾驶车辆的性能而路侧设备无法跟进,会遇到发展瓶颈。

滴滴智慧交通首席科学家刘向宏在第八届(2019)中国智能交通市场年会中表示,“一路无灯,处处畅通”是智慧交通未来的发展方向。
面对未来自动驾驶的必然发展趋势,要做到安全和通畅出行,除了车本身的升级之外,还要对路侧设施和感知系统进行同步改造。
滴滴目前正在济南、柳州等城市开展的智慧信号灯云控平台试验已经取得了一定的成果,这为未来智慧交通的车路协同发展提供了很好的先例。
以下为刘向宏发言内容:
今天我们的主题是:面向智慧交通的云控平台。有人说我们现在处于智能交通的冬天,但冬天来了春天也不会远。现阶段我们处于转型期,传统的智慧交通正在经历第三次交通革命的浪潮当中,处于从智能化、网联化向共享化的转型阶段。
未来城市智慧交通系统构成要素
未来的智慧交通除了人是需求者之外,道路要素有三:智能的车,智能的路,智能的云。智能的车基于单车智能;智能的路与现在的路没有什么不同,根本的不同是现在的道路基于流量的检测变成未来为自动驾驶服务的物体感知的检测。未来的发展趋势是向流量的检测减少和物体感知的检测增加的方向发展的。
在此过程中,无论是车还是路,我们已经积累了大量数据。因此我们提出的“交通大脑”的概念,其实是数据汇集、数据治理和数据建模的平台。
未来,交通出行会更加安全,逐步由自动驾驶解决人为的行车安全问题;管理更加精准,同时掌握人与车两方的信息,对管理的把控会更加精准,效益最优化。
未来城市智慧交通系统的产业生态
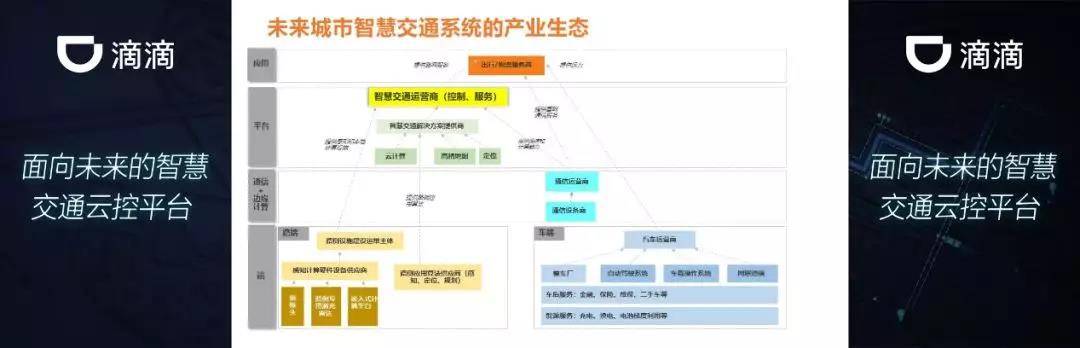
云也是平台端,传统的智慧交通会转型成为未来的智慧交通的运营商。未来会有一种企业能够运营智慧交通系统,提供感知信息的服务,为自动驾驶提供感知信息,解决相关的安全问题。
未来的云控平台是智慧交通运营商的核心技术。对于智慧交通来说,从传统的软硬件结合的智能交通系统会变成软硬件加上数据的智慧交通运营商。智能交通系统服务从原来的孤立迈向开放,因为没有数据的支持许多系统是无法运营的。
传统的智能交通做了大量的以流量检测器为主的铺设,从交通控制角度来看,流量检测器在未来会淘汰掉。而未来的路侧需要有感知设备,单车智能无法解决感知问题的死角。因此,未来的数据会是移动的,而固定点数据的采集模式会发生变化。
滴滴除了提供出行服务,也在做智能车的研发。智能车领域有许多的核心技术,例如高精地图,感知算法和车辆轨迹规划,仿真测试和云端的基础设施建设。

什么是智能的路?
路侧包含通讯单元、感知单元、计算单元、控制单元和诱导单元等。
下图是我们在路口设置的车路协同试验信号灯。

其中,类似于行人“鬼探头”的交通场景可能不会被路侧的无人车感知到,但通过感知设备能够感知前方道路可能出现的危险情况,通过车路协同的手段将感知信息传递到无人车中。
智能网联云控平台基本概念
云控在物理空间内有两个体现:灯和车。灯代表路侧的控制单元,车代表了运载工具。在此基础上设立云控基础平台,该平台是数据汇集和数据标准化的过程。基于这样的平台之上,我们会进行智慧交通方面的应用。
借鉴清华大学李克强教授的解释图如下

未来交通系统的发展方向是朝向网联和无人驾驶发展的,一方面是路侧设备信息采集。数据的来源可以由路侧的检测设备转为浮动车的传感器,进而计算出路网中的交通态势,诊断路网中的交通问题,对路网中控制设备的参数进行优化。
另一方面是车本身,第一要素是对未来的无人驾驶车持有远程操控系统。通过远程操控手段能够让无人驾驶车更加安全地运行。
因此,信号控制是未来云控平台的基础和半边天。
云控平台的发展路径
云控平台本身并不只是在单点交叉路口提供感知计算的能力,由点及面到城市级智慧交通应用,云控平台是未来智慧交通的基础平台之一。
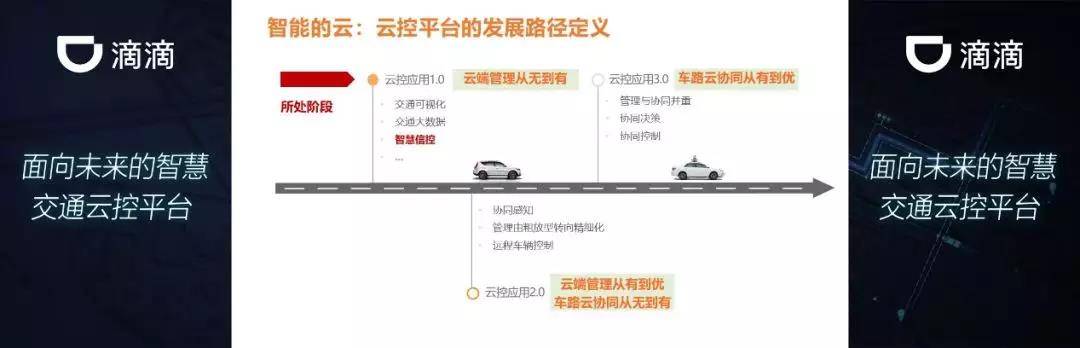
无论是交通大脑还是交通信号灯,都是云控平台的1.0版本,是数据汇集和数据应用过程。云控平台2.0主要解决远程监控问题和协同感知问题,主要是为自动驾驶服务。90年代通用公司研发的的Onstar其实是车载云控平台的雏形。未来的云控平台会将灯和车统一起来,这样的协同控制和优化就是我们的3.0版本。
1.0时代:在过去两年内,我们所做的智慧信号灯或互联网的信号优化就是云控的基础模型。目前,大部分信号控制系统由UTC中心控制系统控制信号机,无论区域级或城市级可能有多个信号控制系统。
通过出行大数据本身,我们可以计算交通态势,诊断交通问题,对交通交叉路口参数进行优化。优化方案通过安全手段传递到信号控制平台,再由平台下达信号控制指令。这与传统的智能交通信号控制是完全不同的,传统基于软硬件和检测设备,现在数据来自第三方,由云端的参数对信号控制进行优化。
下图为柳州实时在线试验案例(截至2018年年底)。

2.0时代:协同感知和远程监控控制成为关键。协同感知基础是路侧的感知设备和通讯单元,主要是为了解决车与路、车与车之间的通讯问题。路侧要铺设感知和检测物体,通过通讯手段传递给无人车或上传到中心云,从而对整个交通系统进行判断和优化。
另一个点是无人驾驶的远程监控。若无人车无法识别前方的障碍或,在交通失控的状态,或任何需要我们做紧急命令停车的情况下,我们就要通过远程监测手段进行远程操控。
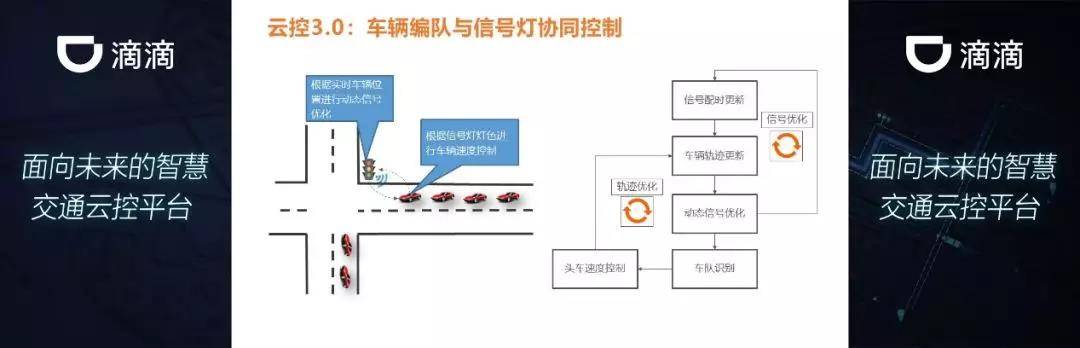
3.0时代:协同优化和协同决策。灯与车是可以协同的,信号灯的优化是时间分配和优化的过程。未来通过对无人车的操控可以对空间进行优化,将达到时空优化的结合。在无人车广泛普及的情况之下,信号灯不再采取物理形式,而采用更协调、更优化的措施和手段。
对未来交通的展望,除了车本身会更加智能,路侧也会提供感知和监测手段。未来每一个交通参与者可以协调有序地运行,“一路无灯,处处畅通”是我们美好出行的心愿。
文章来源: 赛文交通网
其他文章
- 专访公安部交通管理局局长王强:持续推进道路交通安全治理体系和治理能力现代化
- 汉马,加油!需要出行的朋友请看过来
- 这个路段已开始施工,通行请注意!
- 基于系统观念的复杂多路平交路口交通安全综合治理方法
- 春节假期全国道路交通总体平稳有序 | 权威发布
- 公安部发出2024年春运交通安全提示:探亲旅游出行集中 低温雨雪天气多发 需高度重视道路交通安全 | 权威发布
- 武汉交警创新风险防控机制 实现交通风险精准“找堵防”
- 交警全员坚守岗位 元旦假期武汉道路交通平稳有序
- 西安:创建“交警网格+”模式 探索农村交通安全基础共治新路子
- “开门杀”交通事故特征及预防对策研究
- 关于四新北路道路改造工程施工期间交通管理的通告 武公交规〔2023〕68号
- 事关出行,必看!
- 权威发布 | 全国机动车达4.3亿辆 驾驶人达5.2亿人 新能源汽车保有量达1821万辆
- 最新出行提醒!中秋国庆期间这些路段禁行禁停
- 公安部交管局部署中秋国庆假期交通管理工作 全力保障群众假期出行安全顺畅
- 城市道路施工期间的交通问题与对策
- 今起,这段路将单向通行
- 四川:农村道路交通安全管理现状与对策研究
- 施工期间交通组织应用分析(单向交通组织)
- 注意!本周末,这些道路禁行、禁停